





铁路钻爆法隧道全工序机械化研究综述
引言
面向交通强国建设、国土空间扩容、疆域纵深拓展等重大需求,支撑“一带一路”倡议广域通道建设,基础设施向艰险山区等极端复杂环境挺进,随之而来的是隧道工程建设规模更大、建设难度更高,特别在我国西部艰险地区铁路工程隧道占比可达90%。
目前,隧道修建的主流方法仍然是钻爆法和盾构法,其中钻爆法具有灵活性大、适应性广、可靠性强、经济性好的特点,是我国铁路隧道建设最常用的方法。
钻爆法隧道施工装备的发展可以分为“人工”“小型机械”“单一工序大型机械化”“全工序大型机械化”四个阶段,当前钻爆法隧道已实现关键工序的大型机械化;为响应国务院安委会办公室等八部门印发《关于进一步加强隧道工程安全管理的指导意见》中“推进‘机械化换人、自动化减人’”要求,同时结合人口老龄化带来的劳动力短缺及愿意从事隧道现场施工的人员越来越少等问题,提升隧道机械施工水平,“以机换人”是必然需求。欧洲等隧道强国已全面实现机械化,我国煤矿、矿山等行业也在大力推进机械化发展。因此,全面推进铁路隧道“全工序大型机械化”是发展的必然方向。
近年来,在郑万、西昆、成渝中线等高速铁路工程建设中,钻爆法隧道大型机械化建造技术得到了长足发展和广泛应用。以郑万高铁为代表,系统研究了隧道机械化大断面法的工法工艺、支护设计方法、大型机械配套方案、数字化管理等;凿岩台车、湿喷台车、钻注锚一体机及拱架安装台车等核心设备已经成为以上工程建设的标准配置;其中在乌兹别克斯坦安-琶隧道采用凿岩台车、潮喷机、隧道挖装机等机械化配套,开挖进尺可达200m/月,效果显著;在核心大型机械设备制造方面,国外瑞典的AtlasCopco、法国的Secoma等企业在凿岩台车、钻注锚一体机等大型机械制造方面处于领先地位,国内以铁建重工、中铁装备、四川新筑等为代表的装备制造商在持续推进国产装备研发。
总体而言,目前钻爆法隧道机械化施工水平快速发展,但全工序机械化施工面临的一系列关键问题亟需突破。本文通过梳理当前钻爆法隧道机械化施工现状,总结全工序机械化施工仍存在的薄弱环节,并提出全工序机械化施工的未来发展方向。
1 钻爆法隧道大型机械化施工现状
1.1 大型机械化施工设备配置现状
Q∕CR9575-2021《铁路隧道机械化全断面设计施工指南》规定,隧道机械化分为Ⅰ型和Ⅱ型两种,其中Ⅰ型为全工序进行机械化配套,Ⅱ型仅部分工序机械化配套,以下针对Ⅰ型机械化设备配置情况进行详细说明。
1.1.1 Ⅰ型机械化设备配置现状
(1)常规配置情况
以机械化施工效果较好的工程为例,一般按超前地质预报、开挖、装运、支护、仰拱、防排水及钢筋、二衬、养护及沟槽9条作业线分别配置相应的施工设备,如图1所示。

以某高原铁路为例,单线正洞主要机械设备情况如表1所示。

(2)特殊不良地质配置情况
1)软岩隧道:非爆破开挖可采用悬臂掘进机(图2)代替凿岩台车,具有围岩扰动小、断面成形好、超欠挖控制效果明显等优势,但因其重量大无法过栈桥,需在掌子面附近长期停放,故从施组考虑更适用于大断面软岩隧道。

2)岩爆隧道:岩爆主要风险在开挖、支护工序,可采用长臂(折叠臂)湿喷机械手(图3)实现喷混的远距离作业,采用集成消能网施工的钻注锚一体机(图4)以减少危险工序作业时间。


3)断层破碎带:为探明前方地质,防止突泥涌水,且防止压扭性断层卡钻,需配置大功率、可长距离钻孔、可取芯、大角度钻孔的多功能地质钻机(图5)。

1.1.2 Ⅰ型机械化设备纵向布置情况
影响隧道施工进度的8道循环工序为:打设炮孔、装药、爆破、出渣、初喷、打设锚杆、架设钢架、复喷,如图6所示,现场主要大型工装设备按功能区划分为初期支护施工区、仰拱施工区、二衬施工区、养护作业区及设备停放区。以打设炮孔为例,掌子面主要施工机具为凿岩台车,凿岩台车需从设备存放区开至掌子面,待打设炮孔结束后,凿岩台车退回至凿岩台车存放区位置,期间需与挖掘机、装载机、钻注锚一体机、拱架安装机及湿喷机械手等设备错车。

1.2 机械化配置后进度、投资及人员变化
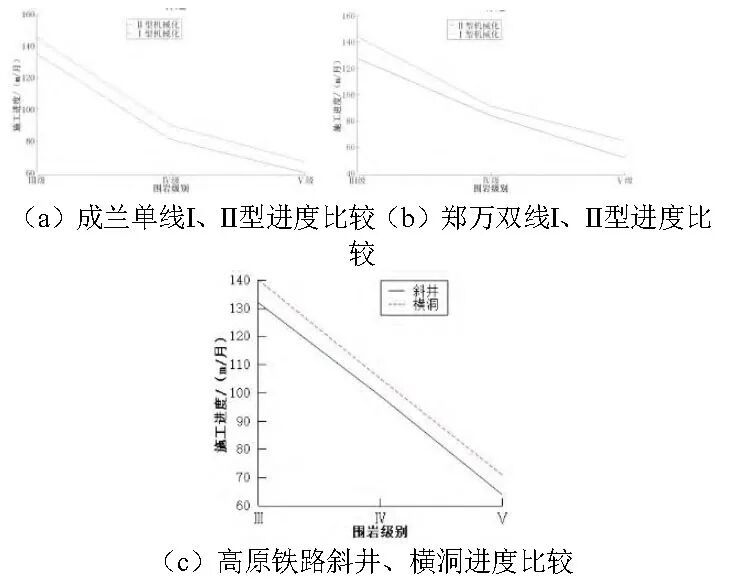
(1)通过调研郑万、拉林、成兰铁路及某高原铁路隧道实际施工进度如图7所示,Ⅰ型机械化施工进度较Ⅱ型提高约10%;横洞因顺坡排水、重车下坡等原因,施工进度较斜井提高6%~11%。
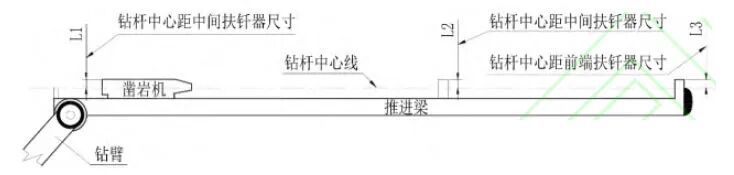
(2)投资方面,Ⅰ型机械化较Ⅱ型机械化投资增加3%~10%,主要原因为凿岩台车开挖定额较高,以及采用凿岩台车开挖时,受凿岩台车推进梁和钻杆位置结构影响(图8),外插角偏大,导致超挖回填量增大。
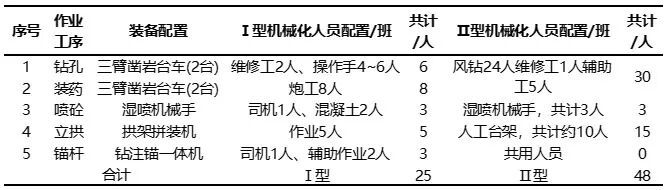
(3)人员方面,如表2所示,某双线隧道采用Ⅰ型机械化较Ⅱ型人员减少23人,节约人工48%。
综上,目前隧道主要施工工序已实现机械化,且在施工进度及减人方面均有提升,但部分工序仍有机械化水平提升需求。
2 亟待提升机械化水平关键工序
通过调研,隧道全工序机械化的人员配置及机械化程度,如表3 所示。
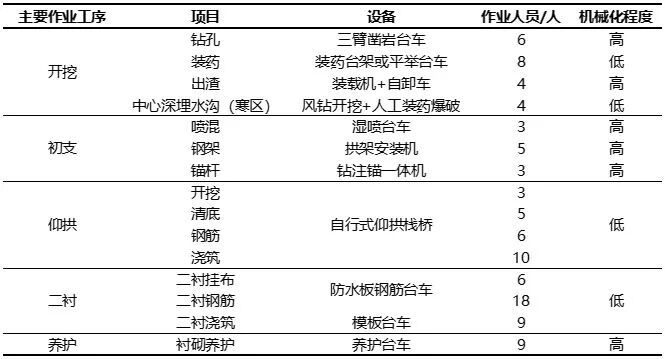
由表可知,目前钻爆法隧道在装药、仰拱、防水板铺设、钢筋绑扎、寒区隧道中心深埋水沟等工序机械化程度较低,现阶段仍为劳动密集型工序,以下将针对可少人化的机械化装药、深埋中心水沟机械化成槽、装配式仰拱、防水板钢筋自动化施工等最新研究进展进行详细说明。
2.1 机械化装药现状
铁路隧道装药以人工为主,当前现场通过开展试验正朝着机械化装药方向发展,主要途径有以下3种。
(1)卷装乳化炸药设备
目前铁路钻爆法隧道使用炸药主要为成品卷装乳化炸药,部分设备厂商尝试利用装药机器人对成品炸药进行机械化装药,但因易出现误炸等问题,效果不理想。
(2)混装乳化炸药设备
混装乳化炸药在矿山施工中应用较成熟,既有设备适用于需大孔径爆破的大型矿山,在铁路隧道工程中应用较少。其中,曹进军等、冷振东等依托某高原隧道进行混装炸药爆破试验,并形成集乳化基质集中生产、远程配送、现场储存、机械化装药、智能化爆破于一体的系统解决方案(图9)。张海涛通过将混装炸药设备与凿岩台车相结合实现机械化装药,并应用于沿江高速火山隧道、宜兴联络线晓峰隧道。隧道现场混装炸药装药设备如图10所示。


虽然现场混装乳化炸药技术在矿山领域已比较成熟,但其在线性隧道工程中相关技术仍有改进需求,且受政策影响较大,目前尚难以普及推广。
(3)散装乳化炸药设备
目前现场机械化装药试验较多的为散装乳化炸药,设备分为两种模式,一种为“装药台车+凿岩台车”模式,即乳化炸药台车通过液压快插与凿岩台车互联,借用凿岩台车泵站为装药台车提供工作动力,通过凿岩台车服务平台为装药台车提供工作平台,实现装药工序的快速进行。“装药台车+凿岩台车”模式工作原理见图11。
另一种模式为一体化装药台车,即将装药系统、装药平台等集成到一台车上。其现场工作情况如图12。

上述两种模式均可提升机械化装药水平,但由于散装乳化炸药的生产、运输及作业均存在相关政策问题,故尚未推广使用。
2.2 装配式仰拱现状
在铁路隧道工程中,装配式研究主要集中于盾构及TBM隧道,钻爆法隧道相关研究起步较晚。
近年来,关于铁路隧道预制装配式衬砌结构研究取得了明显进展,其中,张胜龙等针对高铁单双线隧道开展装配式衬砌结构分块及选型研究,提出在结构弯矩最小处8分块的型式设计方案;周晓军分析高铁单洞双线隧道预制装配式衬砌的分块方法,提出确定预制块几何参数的计算公式;王飞,刘建红,赵晓勇均以某单线铁路隧道为工程背景,分别研究装配式仰拱的预制过程和吊装工艺、设计方案,最终确定纵向分块鱼腹式结构更具优势;田殿军结合现有钻爆法隧道施工工艺,提出一套适用于钻爆法隧道预制装配式仰拱结构拼装的施工方法,并且研发了针对该工法的施工配套设备;郭显所以首座采用矿山法一体化预制装配式仰拱的单线铁路隧道—新建天(水)陇(南)铁路腰坡隧道为依托,系统构建了矿山法预制装配式仰拱施工工艺体系。单线隧道装配式仰拱及装备如图13。
总体而言,钻爆法铁路隧道装配式仰拱现场应用较少,相关结构标准、接头性能、施工工艺等研究仍待加强。
2.3 防水板钢筋台车现状
隧道防水板铺挂和拱墙钢筋施工通常采用简易台架进行人工作业,存在施工效率低、工人劳动强度大、施工质量差、安全性不高的问题。
防水板施工一般包括缓冲层铺设、设置铺挂固定点并安装热熔垫圈、防水板铺设、垫圈焊接、防水板幅间焊接等核心步骤,常规台架改进主要在缓冲层及防水板自动提升环节,自动化程度较低,在此基础上,中铁隧道局集团通过配备多点激光仪进行矩阵定位,实现热熔垫圈精准定位;周治强依托绵苍高速公路项目老鹰岩隧道,通过对防水板台车增加纵向水平轨道、调节机构、热熔焊机组等装置,基本实现隧道防水板幅间自动化焊接。综上,上述改进解决了防水板提升、垫圈定位及幅间焊接的机械化问题,但设置铺挂固定点、安装热熔垫圈、垫圈焊接等工序仍待研究。
钢筋施工包含钢筋上料、布置、绑扎等核心工序,均以人工为主,不仅效率较低,易破坏防水板且缺乏有效措施控制钢筋位置准确性。湖南登峰机械设备有限公司研发的隧道智能钢筋台车,可实现一次自动牵引并自动定位120根主筋,半自动绑扎,同时兼顾多规格防水板半自动铺设,不仅作业人员减少1/3,效率提高30%,且钢筋位置精度及安全性大幅提高,目前已在西昆、延榆高铁等项目进行现场应用。上述设备解决了钢筋上料及布置的机械化问题,但绑扎工序仍待研究。智能钢筋台车如图14。
**2.4 中心深埋水沟施工现状**
部分寒区隧道冻结深度大,需在冻结线以下设置中心深埋水沟,但深埋中心水沟存在影响施工进度、机械化水平低、超挖大等问题。
针对中心深埋水沟影响施工进度问题,目前多采用双栈桥方式解决,如图15所示,为某单线隧道双栈桥施工布置图,小栈桥靠近掌子面,主要负责深埋中心水沟及仰拱初支施工,与大栈桥仰拱施工同步进行,不影响整体施工进度。
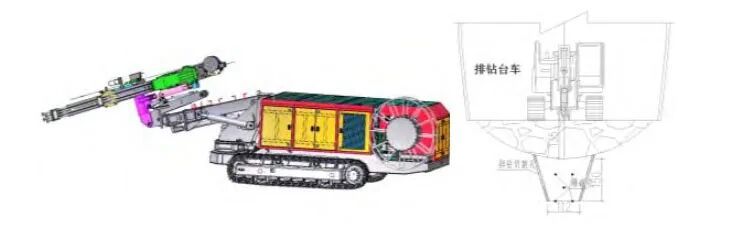
上述双栈桥方案虽解决了施工进度问题,但深埋中心水沟本身仍主要采用人工风钻爆破方式,劳动强度大且施工质量差,针对此问题,王康利用凿岩台车将深埋中心水沟与正洞钻眼爆破同步施工,虽提高了施工效率,但一次性开挖深度大导致安全风险高;钱富林利用“潜孔钻机+组合式栈桥”实现中心深埋水沟的机械化施工,但由于施工面狭窄,爆破超挖仍较大;为解决超挖问题,铁建重工研发了排钻台车,采用四联排钻咬合式钻孔的方式切割水沟侧边,破碎锤破碎(必要时松动爆破)的方式成型,可有效减少超挖问题,但仍处于试验阶段。
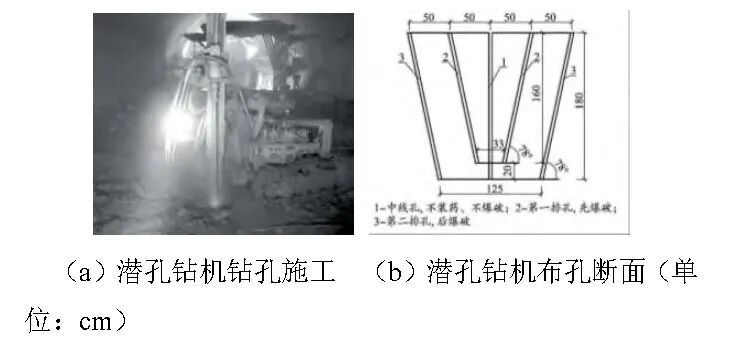
综上,目前中心深埋水沟已初步解决影响施工进度、机械化水平低等问题,但超挖严重问题仍待排钻台车等设备进一步试验解决。
3 小断面隧道机械化施工组织
由于单线隧道隧道尺寸较小,大型机械的使用导致了错车、掉头困难等施工组织问题。
3.1 小断面隧道错车问题
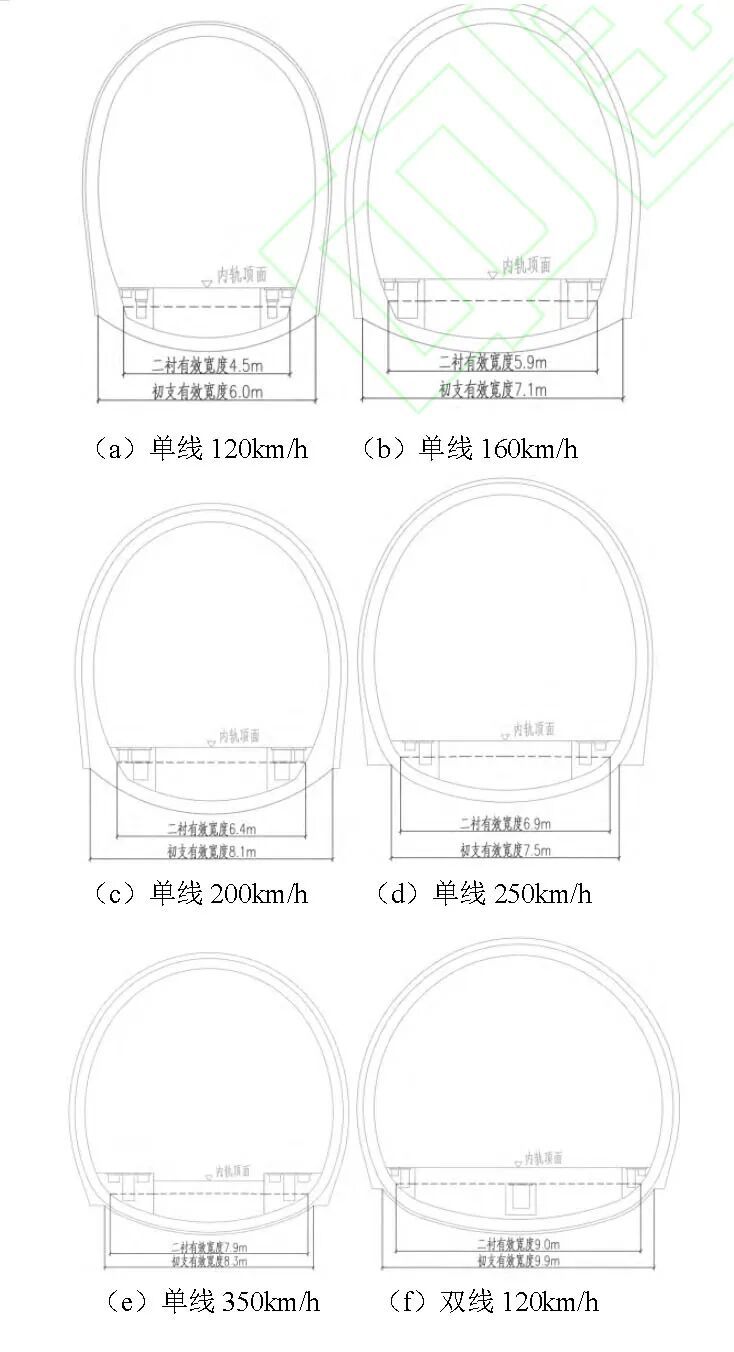
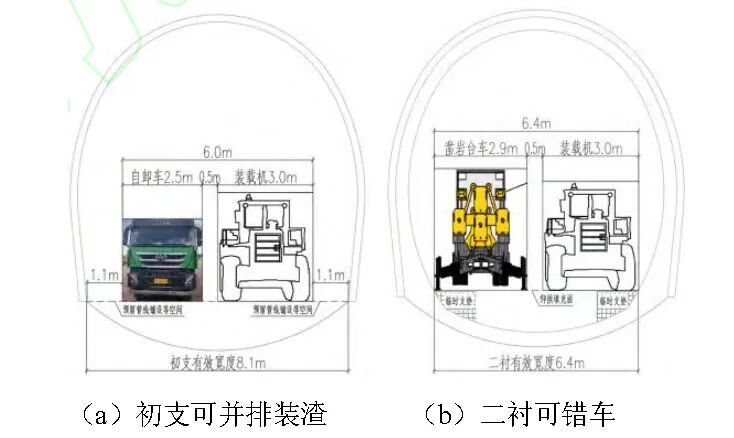
单线隧道一般宽度较小,错车主要受设备宽度控制,Ⅰ型机械化常用设备宽度主要有两种:一种是2.9~3.0m宽的三臂凿岩台车及装载机,一种是2.5m宽的自卸车、湿喷机械手、混凝土搅拌运输车、钢拱架拼装机及钻注锚一体机等设备。由于大型设备需在洞内停放,施工作业时不同设备间均存在错车情况,且在二衬段错车最困难,考虑尺寸最大的三臂凿岩台车及装载机间完成错车,两车间预留错车空间0.5m,则满足错车要求的最小宽度为2.9m+3.0m+0.5m=6.4m。
如图18为不同时速单双线隧道错车宽度,若采用上述常用机械设备,则断面最小的120km/h双线隧道、200km/h及以上单线隧道可满足错车要求,200km/h以下单线隧道不满足错车要求。
**3.2 小断面隧道错车问题解决方案**
针对小断面隧道错车问题,拉林及玉磨铁路(160km/h)采用洞外停放大机或跳衬方式,上述方式存在安全风险或不适用长大工区施工,故需从结构设计及设备选型方面提出合理解决方案,且遵循如下三原则。
3.2.1 原则一:结构、设备互不调整
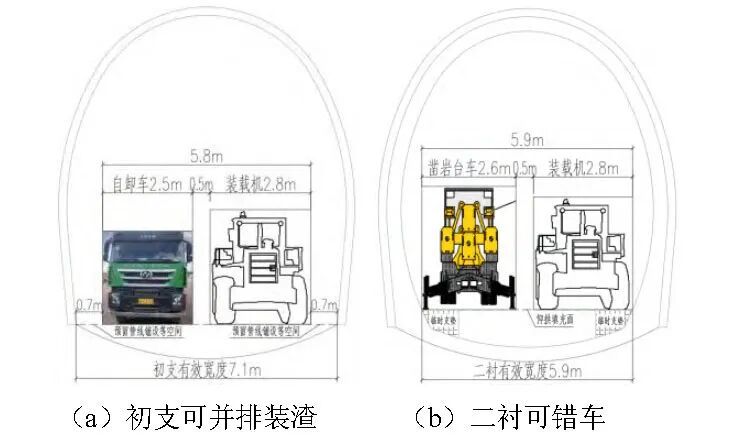
本原则适用于双线隧道、200km/h及以上单线隧道,设计结构断面尺寸及设备型号等均无需调整,即可满足初支段并排出渣、二衬段正常错车需求。
**3.2.2 原则二:设备适应结构调整**
本原则适用于160km/h单线隧道,即设计结构断面尺寸不变,小型化凿岩台车及装载机可满足初支段并排出渣、二衬段正常错车需求。凿岩台车由三臂2.9m宽小型化至两臂2.6m宽,装载机由3.0m宽小型化至2.8m宽,此时二衬段错车控制设备仍是凿岩台车和装载机。错车示意如图20。
**3.2.3 原则三:结构、设备相互调整**
本原则适用于120km/h单线隧道,即设计结构断面尺寸加大,同时小型化凿岩台车、装载机及自卸车后可满足初支段并排出渣、二衬段正常错车需求。凿岩台车由三臂2.9m宽小型化至两臂2.6m宽,装载机由3.0m宽小型化至2.3m宽,自卸车由2.5m宽小型化2.2m宽,此时二衬段错车控制设备是凿岩台车和装载机。错车示意如图21。
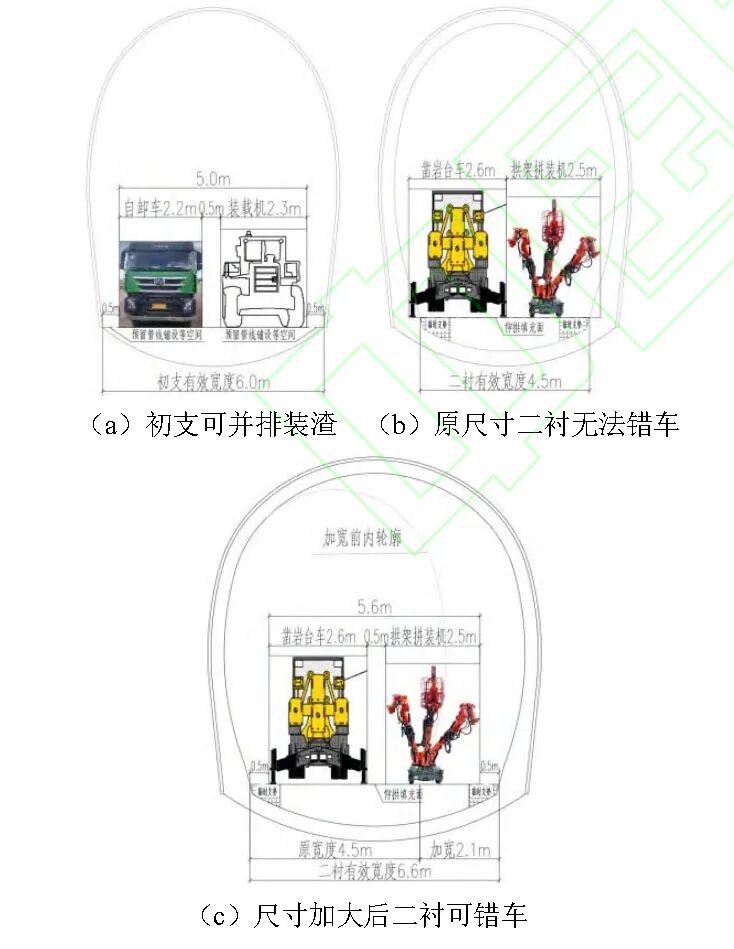
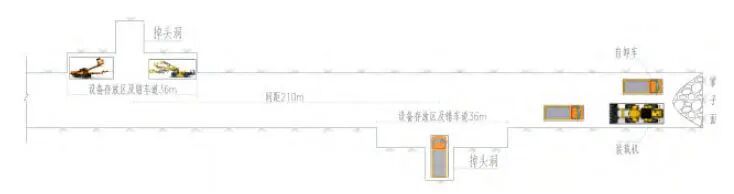
如图21所示,设备小型化后,初支段可并排出渣,但二衬段不满足错车,需加宽2.1m后方可错车,根据设备及洞室布置情况,一般间隔210m设置36m加宽段作为设备停放及错车区域。以出渣工序为例,设备布置情况如图22所示。
**3.3 小断面隧道掉头问题及解决方案**
隧道内需要调头的设备主要有装载机、自卸车、混凝土罐车等设备,其中,混凝土罐车转弯半径最大,极限转弯半径车头外侧为11m,车尾外侧为9m,车身内侧为5.93m。
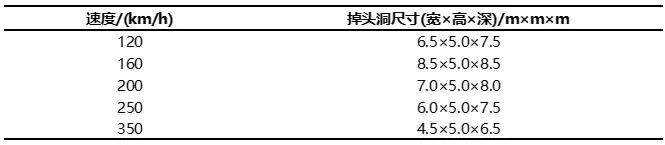
根据规范,单线隧道设置掉头洞尺寸为6m(宽)×5m(高)×6m(深),宽度和深度一般无法满足正常掉头需求,需调整尺寸如下。
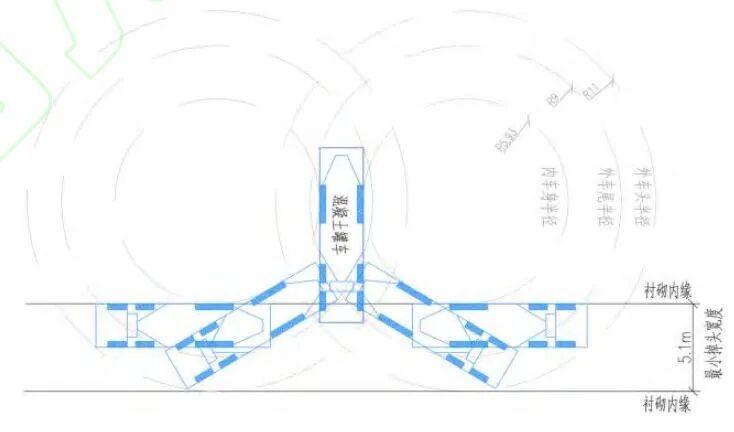
如图23,在方向轮完全极限状态下,一把方向完成调头需要的最小宽度为5.1m,而单线120km/h常规二衬段有效宽度4.5m无法完成掉头,故需结合加宽段设置,如图24所示。
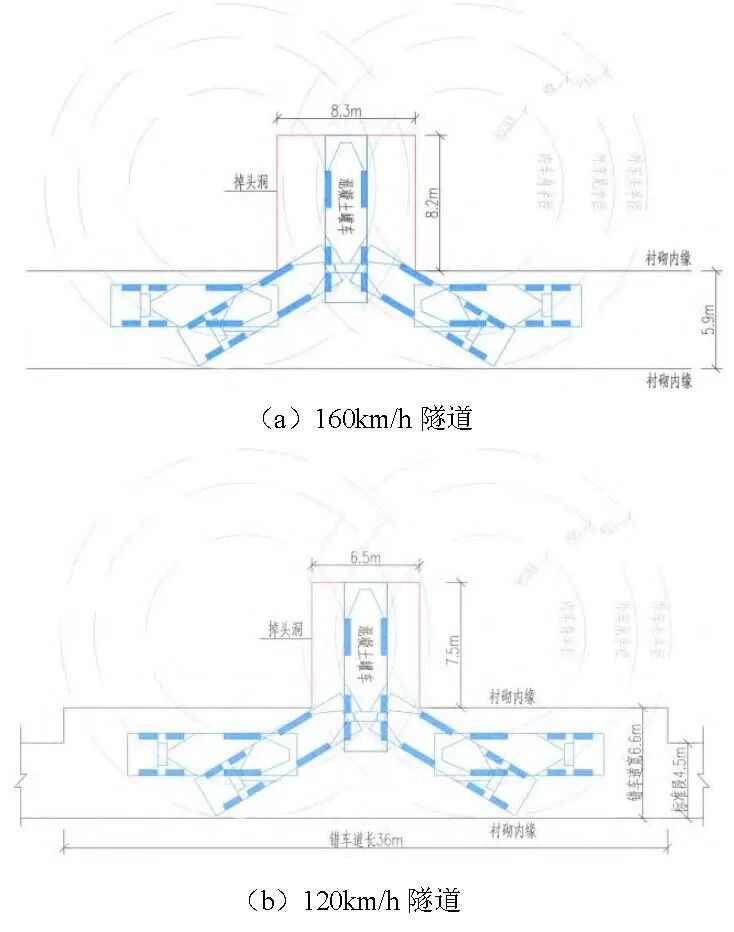
综上分析,单线隧道设置掉头洞尺寸推荐如表4所示。
4 钻爆法隧道全工序机械化研究展望
4.1 小断面隧道机械化配置研究
通过上述分析,120km/h单线隧道需调整结构尺寸及设备型号后方能使用Ⅰ型机械化配套方案,但仍面临断面变化频繁影响施工进度、正常与加宽段无法共用台车导致需增加设备、设备洞内停放间隔大调度困难、设备小型化后施工能力降低等一系列问题。
为解决上述问题,主要从如下两个方向进行研究。
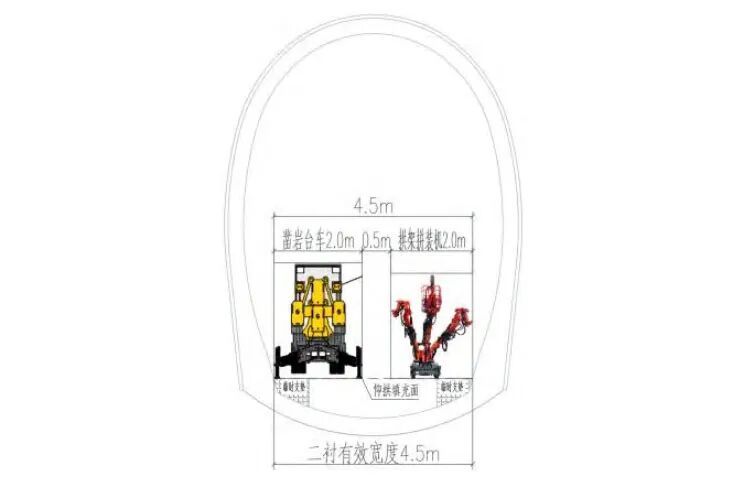
4.1.1 方向一:窄体机方案
此方案需保证全系车宽≤2.0m,如图25所示,可在120km/h单线隧道结构尺寸不变情况下完成车辆错车,从而解决断面变化频繁、设备调度等问题,但需进一步研究设备小型化导致的施工能力降低问题。
**4.1.2 方向二:一体机方案**
除从减小设备尺寸方向考虑外,还可考虑通过功能集成来减少设备数量的一体机方案,具体如下。
(1)局部工序一体机方案
研究将临近工序作业功能集成,从而减少设备数量,典型设备如下。
1)钻爆一体机:将钻眼、装药爆破功能集成。
2)锚网注一体机:将锚杆与钢筋网功能集成。
3)拱锚一体机:将拱架与锁脚锚管功能集成。
4)多功能栈桥:将仰拱开挖、出渣、支护及养护功能集成。
5)深埋中心水沟开挖-安装一体化施工装备。
(2)全工序一体机方案
1)硬岩开挖支护一体机
研究具有超前支护、钻孔、装药、拱架安装、锚杆施工、挂网、喷射混凝土等功能的硬岩开挖支护一体机,避免多装备错车,同时门架式结构预留了挖装运装备通过空间,如图26为铁建重工研究方案。

2)软岩开挖支护一体机
研究具有超前支护、开挖、出渣、拱架安装、锚杆施工、挂网、喷射混凝土等功能的软岩开挖支护一体机,避免多装备错车,如图27为中铁装备研究方案。

**4.2 机械化施工装备短板效能提升研究**
虽然隧道大部分工序实现了机械化施工,但部分机械亟需进行性能提升,具体如下。
(1)凿岩台车:研究整机定位及机械臂末端精准定位定姿技术,同时针对小断面隧道斜眼掏槽角度受限问题进行设备改进。
(2)机械化装药设备:研究多种乳化炸药形式,实现炸药按需注入、少人化快速装药及超欠挖控制。
(3)钻注锚一体机:研究小断面隧道锚杆打设长度受限问题,增加锚杆信息可追溯功能。
(4)湿喷机械手:研究复杂尘雾环境下轮廓实时扫描重建与喷射指引技术,实现喷射混凝土高平整度智能控制。
(5)防水板钢筋台车:研究防水板自动设置铺挂固定点、安装热熔垫圈、垫圈焊接,钢筋自动绑扎等功能。
4.3 绿色施工装备研究
4.3.1 新能源设备研究
当前,钻爆法隧道出渣工序占循环时间的40%~60%,且配套作业装备目前多为燃油(内燃机驱动)型。在高海拔地区,因空气稀薄,导致燃油出渣装备作业效率低、油耗高,环境污染严重。因此,需大力研发新能源出渣装备,且徐工、柳工、长安重工、三一等国内企业陆续推出电动挖掘机、电动装载机、电动自卸车和电动混凝土罐车等设备。任彦丽依托高海拔隧道工程,提出电动挖掘机、电动装载机、电动自卸车等新能源装备应用的建议及技术方案。上述新能源装备仍存在续航能力差、购置成本高、需洞外充电及电池安全等问题,亟需在既有新能源装备基础上研究:①续航能力提升;②电池安全及隧道内换电;③全工序新能源大型机械配套等技术。
4.3.2 皮带机出渣研究
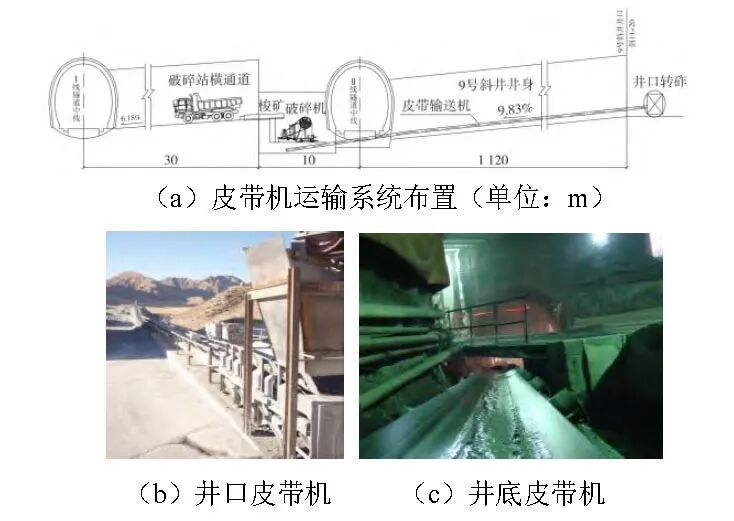
钻爆法隧道长大斜井无轨出渣方式存在环境污染严重导致通风困难、运输效率低、施工安全风险高等问题,而皮带机具有输送能力强、运量大、自动化程度高、绿色环保等特点,在国外,美国、欧洲、日本等地的钻爆法隧道施工部分采用皮带运输出渣技术,如德国的Engelberg隧道和Loetschberg隧道,日本新干线的饭田隧道及田上隧道等。但国内钻爆法隧道采用皮带机出渣的应用较少,如某高原铁路隧道洞内采用常规无轨出渣,洞口破碎后通过皮带机运输到渣场的方式,具有减少占地、伐木、有害气体排放、能耗等优势,但仍未解决洞内出渣问题;新关角隧道首次将皮带运输系统成功应用于钻爆法施工的隧道,具有减少尾气、保障人员职业健康、提高出渣效率的优势,但需在斜井底设置固定的破碎站,导致掌子面出渣转运困难,且一次性投入大。因此,应进一步研究适用于铁路隧道洞内出渣的移动式破碎站及配套设施。

**4.4 隧道无人化研究**
在钻爆法隧道实现全工序机械化施工后,应进一步向智能化发展,最终实现隧道无人化施工,因此需研究隧道工地多要素耦合下智能施工组织多目标优化理论和集群装备协同作业时空调度与控制理论,突破人机料法等生产要素和施工组织动态调控、智能装备高精度定位与导航、障碍物精准识别与自主避障和远程遥控等技术,进一步研发“施工状况感知—装备作业参数调控”互馈机制的智能装备,构建集群智能装备集中控制中心和无人施工智能管控平台。大幅提升铁路隧道智能建造能力和水平,支撑交通强国建设。
5 结论
通过对钻爆法隧道机械化施工现状、存在问题及研究进展等方面进行分析总结,主要结论如下。
(1)设备配置原则与效益显现:钻爆法隧道机械化施工应遵循按九大作业线科学配置设备的核心原则,并对特殊不良地质条件进行设备选型优化。虽初期投资有所增长,但机械化配置有效实现了施工进度显著提升与作业人员数量大幅精简的核心目标,投资回报效益显著。
(2)关键技术瓶颈与升级方向:当前施工环节中,装药、仰拱施作、防水板铺设、钢筋绑扎以及中心深埋水沟开挖等工序的机械化程度亟待突破。未来研究应重点攻关机械化装药技术、装配式仰拱结构应用、防水板与钢筋自动化施工工艺、深埋中心水沟高效成槽机械等关键技术难题。
(3)小断面隧道施工组织优化与设备创新:小断面隧道机械化施工错车问题可通过结构/设备互不调整、设备适应结构、结构/设备协同调整三原则予以系统性解决;掉头问题则可通过优化隧道设计、增大掉头洞室尺寸来有效应对。此外,针对小断面特殊工况,亟需深化研究窄体化设备及多功能一体机解决方案,并持续提升现有凿岩台车、机械化装药设备、钻注锚一体机、湿喷机械手、防水板钢筋台车等核心装备的作业效能与适应性。
(4)绿色与智能化发展路径:推动隧道施工可持续发展,需大力提升新能源动力设备在洞内复杂环境下的适用性与可靠性,并着力改进洞内皮带机出渣系统的效率与环保性能。在实现全工序机械化的基础上,未来应深入探索智能施工组织理论、设备集群协同控制系统,研发具备更高自主决策能力的智能装备,构建集成化智能施工管控平台,最终迈向隧道无人化智能建造的远景目标。